This week I made a lot of progress with the loom, which is good since the show is only 2 weeks away, and dress rehearsal less than 1 week away.
I got it all set up on the ITP floor, got my sensors hooked up, and am spending this next week composing and figuring out my performance.
I was experiencing a drawback with getting the wireless accelerometer data into max/msp, but finally ironed that out a minute ago; the WiTilt 2.5 from SparkFun is a great little device, but there are some pitfalls to watch out for, which caused me many hours of frustration. Here are some tips:
- after you connect to the WiTilt over its serial port, make sure you hit the onboard reset button twice. Only after doing this was I able to get into the config screen from zterm (or terminal) in order to set the device up.
- when you configure the WiTilt, make sure the data is being sent out as 'raw data'. This will send everything out as ascii.
- once you are in max and connected to the WiTilt's serial port, don't forget that you won't be seeing the config screen (unless you are printing the incoming data after sending it through the atoi object), so just trust that after you hit the reset button twice and start getting a string of characters (which should be the config menu converted to dec values), you need to send a '1' character (49) in order to get the data stream started.
- conversely, send a spacebar character (32) to stop the data stream
- the best way to parse out the values you want from the data stream (which will be coming at you in ascii as something like X=392 Y=772 Z=857), is to use regular expressions. I configured my WiTilt to only send me values along the Y-axis, so i was getting a continuous stream of Y=553 (or whatever current reading was). I pulled that data in from the serial port into max, converted the ascii to an integer (atoi), and then used the following regular expression with the max regexp object to get the sensor value: ([\\d+]*)
That regex will take all the numbers out of the incoming serial packet and append them one after another, thus giving you a complete sensor reading (instead of giving you the reading as individual numbers. i.e. 583 coming to you as 5, 8, 3).
The thing that screwed me up the most in the beginning was forgetting to hit the reset button on the WiTilt. I'd sit there insanely frustrated, wondering why the config menu wasn't coming up. Unless I missed it after reading the datasheet a million times (which is still possible I guess), it's not noted by SparkFun that you have to do this. So when in doubt, hit the reset button!
Okay, so the other problem was my stretch sensor wasn't giving me values. That was just a result of a bad connection on the breadboard.
Other things that I have to do is size the yarn. Because it's wool, it's sticking to itself, so to speak. Wool fibers are composed of gazillions of tiny barbs that hook onto each other (which is why felting exists), and to get around this, you need to 'size' your wool, or soak it in water and elmer's glue, basically. One of my upright beams warped and cracked as well, so that was unfortunate.
So for next week, the plan is:
- build a stand for the loom (so it doesn't have to lean up against the wall)
- size my yarn
- compose
- implement xbee circuits so i can transmit sensor values wirelessly (although this will probably not be the version I use in the show, just in case something screwy happens last minute. Wires are much reliable)
Showing posts with label zigbee. Show all posts
Showing posts with label zigbee. Show all posts
Monday, December 03, 2007
Tuesday, November 27, 2007
Loom: Update 6
Okay, I'm still waiting for a space to set my loom up in. And my cat got sick on my laptop, thereby killing it (it's not salvageable apparently) and cutting my access to my max/msp and arduino files thusfar developed. Not a great week.
But I did make some progress, despite that. I re-did my warp, as it wasn't long enough the first time I made it, and it went A LOT faster the second time around (about 2 hours vs, uh, 10 hours last time). So that is now finally complete and attached to my top beam. Other things completed:
- Got the correct bolts in my top beam supports. It's all bolted up to the uprights and ready to go.
_ Got my shed stick cut and bolted to the bottom of the loom (for separating the front and back threads from each other)
- Put together xbee/accelerometer circuits to go on five of the 24 weights hanging from the warp
- Got my shuttle put together with the wireless accelerometer sensor + a lithium battery
- Rewrote my max patch to where it was before
Oh yes, the xbee is an addition, heh. I am combining this final with my Mesh Networking final, and making the weights wireless devices that send their values remotely. I will be keeping a wired version of the code and board handy though, in case some kind of wireless mishap takes place, which seems to always be a danger, and I don't want any of that at showtime.
This next week is just wrapping everything up I guess and well, getting the xbee stuff all working flawlessly as well as tweaking the sound still.
But I did make some progress, despite that. I re-did my warp, as it wasn't long enough the first time I made it, and it went A LOT faster the second time around (about 2 hours vs, uh, 10 hours last time). So that is now finally complete and attached to my top beam. Other things completed:
- Got the correct bolts in my top beam supports. It's all bolted up to the uprights and ready to go.
_ Got my shed stick cut and bolted to the bottom of the loom (for separating the front and back threads from each other)
- Put together xbee/accelerometer circuits to go on five of the 24 weights hanging from the warp
- Got my shuttle put together with the wireless accelerometer sensor + a lithium battery
- Rewrote my max patch to where it was before
Oh yes, the xbee is an addition, heh. I am combining this final with my Mesh Networking final, and making the weights wireless devices that send their values remotely. I will be keeping a wired version of the code and board handy though, in case some kind of wireless mishap takes place, which seems to always be a danger, and I don't want any of that at showtime.
This next week is just wrapping everything up I guess and well, getting the xbee stuff all working flawlessly as well as tweaking the sound still.
Tuesday, October 23, 2007
Kick Me: Finished!
We got our xbee/fsr controlled kick game for Mesh Networking working today!
The icons come out on a broadcasted beat, which our xbee picks up, and then are 'kicked' to one of four environments, depending on which force sensor pad the player stomps on.
So okay, we aren't actually 'kicking' anymore; it's now 'Stomp Me'. Or alternately Kick (Stomp) - A - Mole (Icon).
Anyways, here's a screen cap:

And the Processing source code:
SRC
The icons come out on a broadcasted beat, which our xbee picks up, and then are 'kicked' to one of four environments, depending on which force sensor pad the player stomps on.
So okay, we aren't actually 'kicking' anymore; it's now 'Stomp Me'. Or alternately Kick (Stomp) - A - Mole (Icon).
Anyways, here's a screen cap:

And the Processing source code:
SRC
Tuesday, October 16, 2007
xbee game (as yet unnamed)
My group and I decided to make a little foot-eye coordination game, coordinated to a xbee broadcasted beat. The parts to our project are as such:
- a physical interface consisting of a kick pad with FSRs in them, for recording which pad was kicked and how hard.
- the hardware involving an xbee and arduino, for capturing the broadcast beats and fsr readings
- the software, processing, for displaying our environment, which will be updated per the data sent over from our arduino.
Basically, our processing environment consists of four areas: a forest, a city, a desert, and a river. The screen will be divided into four equal parts for each eco-system. Moving along the bottom of the screen (coordinated to every 2nd broadcast beat) will be a conveyor belt, carrying with it three different kinds of icons: an egg, a baby, or a seed:
These icons will drop onto the conveyor belt in coordination with the broadcasted beat. Depending on which FSR pad you kick, you can send each of these icons out into one of the four environments. How hard you kick the pad will determine how far out 'into' the screen the icon travels. Finally, depending on which icon you kicked and which environment it landed in, the egg/seed/baby will grow into a specific animal/plant/character. For example, if you kick the baby into the city/desert/forest/river, you will get:
So far, we have designed our icons and have the core architecture of the processing program in place. We also have been able to pick up the broadcasted beat and are working on putting together a kick pad.
We have divided up the labor as such:
Shin-yi + Sarah: Graphics/Animation/Processing programming
Daniel + Shilya: Kick pads and hardware programming
- a physical interface consisting of a kick pad with FSRs in them, for recording which pad was kicked and how hard.
- the hardware involving an xbee and arduino, for capturing the broadcast beats and fsr readings
- the software, processing, for displaying our environment, which will be updated per the data sent over from our arduino.
Basically, our processing environment consists of four areas: a forest, a city, a desert, and a river. The screen will be divided into four equal parts for each eco-system. Moving along the bottom of the screen (coordinated to every 2nd broadcast beat) will be a conveyor belt, carrying with it three different kinds of icons: an egg, a baby, or a seed:
 |  |  |
These icons will drop onto the conveyor belt in coordination with the broadcasted beat. Depending on which FSR pad you kick, you can send each of these icons out into one of the four environments. How hard you kick the pad will determine how far out 'into' the screen the icon travels. Finally, depending on which icon you kicked and which environment it landed in, the egg/seed/baby will grow into a specific animal/plant/character. For example, if you kick the baby into the city/desert/forest/river, you will get:
 |  |  |  |
So far, we have designed our icons and have the core architecture of the processing program in place. We also have been able to pick up the broadcasted beat and are working on putting together a kick pad.
We have divided up the labor as such:
Shin-yi + Sarah: Graphics/Animation/Processing programming
Daniel + Shilya: Kick pads and hardware programming
Sunday, October 07, 2007
ROCK/PAPER/SCISSORS
My partner and I each built a device with an arduino and xbee radios that can wirelessly play rock/paper/scissors with the other. We got it 100% working now, but until today, there were two strange bugs causing me (the programmer) a major headache.
ARDUINO SRC
The Problems :(
The first bug was how the win/loss/tie was being tallied; only one of us ever got the results back from our match (had one of our win/loss/tie LEDs switch on), and it was always opposite of what it should have been. For example, if I rolled first, and chose rock, and then she rolled and chose scissors, her 'win' light would turn on (even though she should have lost), and I would have no outcome LED turn on at all.
The second bug (which turned out to be the reason for why one of us wouldn't have an outcome LED light up) was causing the character 'A' to be sent out the serial port, after each round played. Whenever we started a new round, the program would run through the whole switch statement, and then for one us, begin to start a new round up again, without having triggered the program to do so. This also caused one of us to not have an outcome LED turn on, because I programmed the game to turn off all LEDs on the board (to reset the board, essentially) at the start of each new round.
The Answers! :)
The first bug was due to my dyslexic coding. After I make a choice and send it to my opponent, and receive my opponent's choice, i run the data through a function that compares the two choices and switches on the appropriate outcome LED (win/tie/loss). Well, the issue turned out to be that I was comparing the opponent's choice as though it was *mine* and my choice as though it was my *opponent's*. Thus, we were getting the results backwards and the wrong outcomes. Once I fixed this, we were getting the right outcome LEDs to turn on.
The second bug was due to us not having put any delays in our main switch statement. After adding a 1 second delay before setting the game back into 'gameOver' mode (in the last case statement), we finally weren't getting any extra characters sent out the serial port (which was screwing up the whole game flow). Basically, I have a function in the main loop that is constantly checking the status of the play button. If the play button is high (is depressed) *and* the game's current status is 'gameOver', it sets the game's status to 'start', sends an 'A' out the serial port (to start the handshake with the other device), and randomly picks a number corresponding to rock/paper/scissors while waiting for the other guy to start their game too. Essentially, it starts a new round of rock/paper/scissors. Well, what was happening was that the program was playing and processing one round faster than we could finish pushing the button. Which is pretty damn fast. So adding a 1 second delay in there gave our lowly human hands enough time to stop pushing the button before the game was over.
Other than those issues, we only had one other pitfall, which I'm sure plagues 90% of people working with xbees. At least when you first start working with them, and have been up coding for 12 hours straight: We assigned the same id's to each radio. We figured that problem out early on, but it's still worth mentioning. Make sure your radios actually have someone else to talk to. Talking to yourself doesn't get you too far in the world of wireless communication.
ARDUINO SRC
The Problems :(
The first bug was how the win/loss/tie was being tallied; only one of us ever got the results back from our match (had one of our win/loss/tie LEDs switch on), and it was always opposite of what it should have been. For example, if I rolled first, and chose rock, and then she rolled and chose scissors, her 'win' light would turn on (even though she should have lost), and I would have no outcome LED turn on at all.
The second bug (which turned out to be the reason for why one of us wouldn't have an outcome LED light up) was causing the character 'A' to be sent out the serial port, after each round played. Whenever we started a new round, the program would run through the whole switch statement, and then for one us, begin to start a new round up again, without having triggered the program to do so. This also caused one of us to not have an outcome LED turn on, because I programmed the game to turn off all LEDs on the board (to reset the board, essentially) at the start of each new round.
The Answers! :)
The first bug was due to my dyslexic coding. After I make a choice and send it to my opponent, and receive my opponent's choice, i run the data through a function that compares the two choices and switches on the appropriate outcome LED (win/tie/loss). Well, the issue turned out to be that I was comparing the opponent's choice as though it was *mine* and my choice as though it was my *opponent's*. Thus, we were getting the results backwards and the wrong outcomes. Once I fixed this, we were getting the right outcome LEDs to turn on.
The second bug was due to us not having put any delays in our main switch statement. After adding a 1 second delay before setting the game back into 'gameOver' mode (in the last case statement), we finally weren't getting any extra characters sent out the serial port (which was screwing up the whole game flow). Basically, I have a function in the main loop that is constantly checking the status of the play button. If the play button is high (is depressed) *and* the game's current status is 'gameOver', it sets the game's status to 'start', sends an 'A' out the serial port (to start the handshake with the other device), and randomly picks a number corresponding to rock/paper/scissors while waiting for the other guy to start their game too. Essentially, it starts a new round of rock/paper/scissors. Well, what was happening was that the program was playing and processing one round faster than we could finish pushing the button. Which is pretty damn fast. So adding a 1 second delay in there gave our lowly human hands enough time to stop pushing the button before the game was over.
Other than those issues, we only had one other pitfall, which I'm sure plagues 90% of people working with xbees. At least when you first start working with them, and have been up coding for 12 hours straight: We assigned the same id's to each radio. We figured that problem out early on, but it's still worth mentioning. Make sure your radios actually have someone else to talk to. Talking to yourself doesn't get you too far in the world of wireless communication.
Sunday, September 23, 2007
Wireless LED Glow
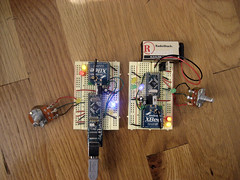
I can make an LED glow wirelessly!
xbee_glow
Originally uploaded by 0x000000
okay, here's what it involves: 2 XBee radios, 2 microcontrollers (I used arduino minis), 2 power sources, 2 variable resistors, and a couple LEDS to control (i'll call these analogue LEDs from here on out). I tried to keep my wires on my board tidy, as wires generate their own radio waves which can create interference with the radio signals your xbees are trying to send out. I didn't do the absolute best job with the tx/rx wires, but it didn't seem to cause any transmission problems, so I let it slide.
Basically, this exercise controls the brightness of an LED on one board (the analogue LED), from another board, via values generated from a potentiometer and sent out wirelessly through an xbee radio. So we go pot 1 --> microcontroller1 --> xbee 1 --> xbee2 --> microcontroller 2 --> analogue LED 2. And this of course, works going the other way as well. Each board can control the brightness of the other's analogue LEDs.
One little pitfall that derailed me for a moment, was having the analogue LED on an analog i/o pin vs adigital i/o PWM pin. While it was tied to an analog i/o pin, i wasn't able to turn it on at all. Make sure the analogue LED is on a digital i/o PWM pin, which you then analogWrite to in order to get it to glow.
xbee_glow
Originally uploaded by 0x000000
okay, here's what it involves: 2 XBee radios, 2 microcontrollers (I used arduino minis), 2 power sources, 2 variable resistors, and a couple LEDS to control (i'll call these analogue LEDs from here on out). I tried to keep my wires on my board tidy, as wires generate their own radio waves which can create interference with the radio signals your xbees are trying to send out. I didn't do the absolute best job with the tx/rx wires, but it didn't seem to cause any transmission problems, so I let it slide.
Basically, this exercise controls the brightness of an LED on one board (the analogue LED), from another board, via values generated from a potentiometer and sent out wirelessly through an xbee radio. So we go pot 1 --> microcontroller1 --> xbee 1 --> xbee2 --> microcontroller 2 --> analogue LED 2. And this of course, works going the other way as well. Each board can control the brightness of the other's analogue LEDs.
One little pitfall that derailed me for a moment, was having the analogue LED on an analog i/o pin vs a
Subscribe to:
Posts (Atom)
